Last updated 09/06/2020
This article is intended as guide to the adoption of object-oriented (OO) techniques in PLC programs written using structured text using TwinCAT3.
An example project showing some of these ideas in practice can be downloaded here
Background
TwinCAT is a programming tool provided by Beckhoff for programming their range of PC based controllers. TwinCAT3 is the latest version and supports 3 programming styles:
- Procedural
- A mix of procedural and object-oriented programming
- Purely object oriented programming
Many PLC programs are difficult to understand and difficult to modify due to a high degree of coupling between modules and to informal communication paths between modules. This can be a result of the conflicting requirements of:
- The high degree of interaction between different parts of a machine
- The need to minimise coupling and dependancies between different parts of the program.
An object oriented approach offers a way of reconciling these requirements by allowing POUs to encapsulate behaviour and to exchange messages and in a consistent and well defined way.
However, when I first tried writing a program in a fully object-oriented style, I found it was not straight-forward. Creating the classes was easy – getting them to collaborate was hard. I think this is a natural consequence of the properties of objects that make them so useful – encapsulation.
This article will attempt to explain some of the techniques I have found minimise these difficulties.
Procedural Code
A procedural program will generally comprise the following
- Programs – top level POUs that access global variables and call function blocks
- Function blocks – POUs that accept inputs and drive outputs that are assigned when the function block is called. Function blocks may in turn contain function blocks and functions
The arrangement of function block calls and the messaging between function blocks is fixed by the program which has the advantage of being simple but the disadvantage of being inflexible. It works but we can do better.
Procedural/OO Mix
A half-way house to moving to a fully OO architecture is to use a mix of procedural and OO styles. The major building blocks of the program are still implemented as function blocks called by programs, but the smaller function blocks that provide services are implemented as classes. This can improve the readability of code by providing a fluent interface (Here is an interesting post on fluent interfaces in TwinCAT3 written by Gerhard Barteling).
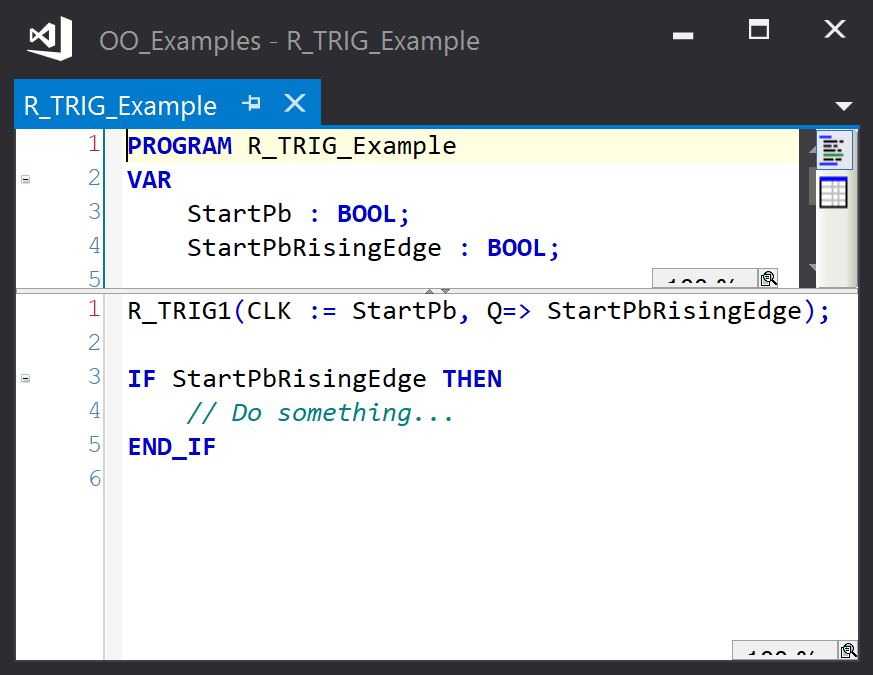
For example, the standard rising edge trigger function block can be used as follows:
We can make this slightly easier to read by wrapping the R_TRIG in a class:
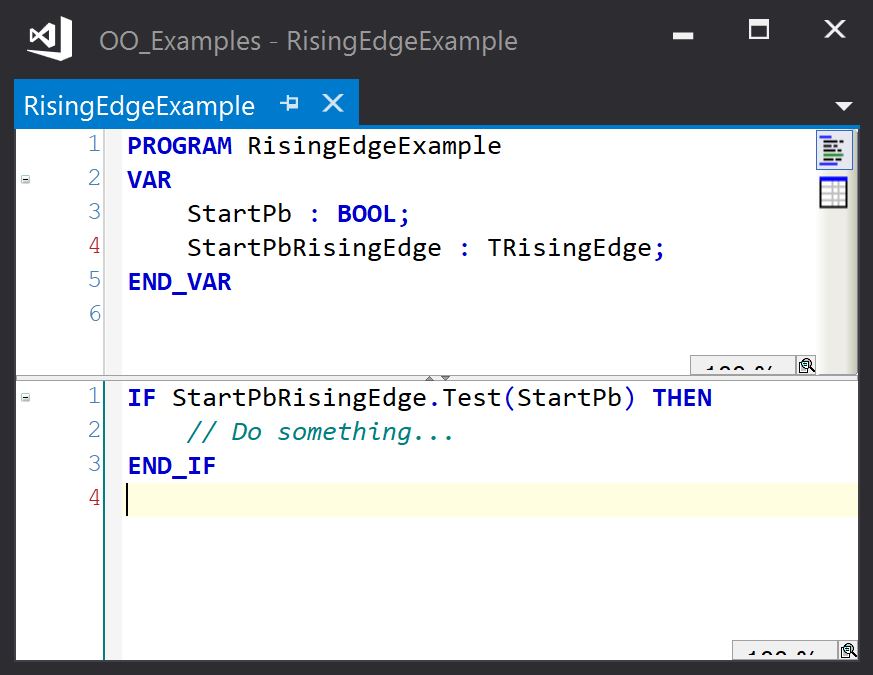
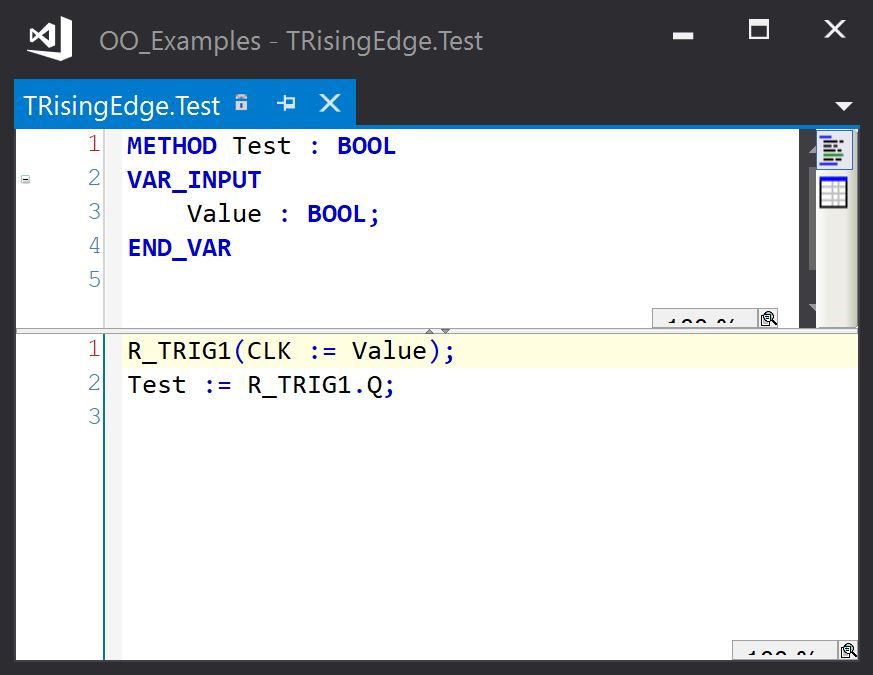
The TRisingEdge POU is a function block with a single method (Test):
This can be a useful way to introduce classes of gradually increasing complexity to a procedural program to get a feel for how objects can be used to present an intuitive interface to the client code, and hide the implementation details.
Fully OO Code
A fully OO program is one where all function blocks are implemented as classes – i.e they use properties and methods to provide interfaces to other objects. Classes are instantiated as objects that interact with each other to provide the required functionality.
So what are the guidelines that we can use to identify the classes we need? The best way that I have found is to think of a class as something with a single responsibility (or a small collection of closely related responsibilities). This quite often turns out to be the noun-based classes that are the traditional candidates for classes but it can also accommodate more abstract responsibilities such as parts tracking or alarm handling.
Provided these classes are kept small, implementing them can be fairly straightforward, as all the required information is held by the class in a well defined context. The class defines the operations required to handle it’s responsibility.
The class may carry out this operation during its cyclic execution, or it may allow other objects to invoke the operation as a service via a public interface.
The problem to solve is how to arrange the instances of these classes so that they can safely invoke each other’s services.
The Problems Of Ownership
The simplest case is where the client object (object requesting an operation be performed) owns a service object (object implementing the operation to be performed). In the rising edge trigger example shown earlier, the client object (RisingEdgeExample) asks the service object (StartPbRisingEdge : TRisingEdge) to use its Test methods to detect a rising edge and return true when one is detected. This works a treat, so why not use this all the time?
- It only works if the client object is the sole user of the service object. This is generally the case for small classes such as timers and edge triggers, but not for larger classes that other clients may want to access.
- If the service object is complex, it will need to hold its own service objects. This can result in a deep heirachy of objects, which should be avoided as it is difficult to change and difficult to navigate.
A better approach is to avoid nesting complex classes. Instead, assume all complex objects may need to be accessed by other objects, and instantiate them in a global object list. Provided the interface is carefully designed to ensure it is safe to use and cannot lead to an invalid internal state, there should be no problem making such an object globally accessible.
Referencing Shared Objects
If we have a global object list, any object can reference an other object by using its fully qualified name. Whilst this is reasonable for small programs, it should be avoided because:
- A dependancy is created between the classes which makes the program harder to understand and change.
- An instance of an object may not know which service object it is interested in where multiple instances of the service exist (such as where there are repeated machine elements, for example)
The alternative is to pass in a refence to the service object when the client object is called, either as a reference (using VAR_IN_OUT), or as an interface pointer (using VAR_INPUT) – also known as dependancy inversion.
Dependancy Inversion
Here, the VAR_INPUT parameter type is an interface. The service object must implement this interface so it can be implicitly converted when it is passed to the client during the call, and the interface must define the properties and methods to be used by the client so the client can use this interface pointer as if it were the service object itself
Thus, only the parts of the server object that are interesting to the client need be passed in. A benefit of this is that to test the client, a dummy class that implements the interface (a test double) can be passed in to remove the dependancy during testing.
Invoking Asynchronous Operations
Where a client wants to invoke an asynchronous operation on a service object (i.e one taking multiple scans with the possibility of the operation failing), a single method is not sufficient – one method is required to invoke the operation and another to query the current state of the operation. A third may be required to abort the operation under certain conditions (E-Stop, for example). In order to tie these methods together, an abstraction can be used that follows the command pattern.
Command Pattern
This pattern uses a command object to represent the the invocation of an asynchronous command. The command object is an instance variable of the service object. It implements an interface that is made public via a property of the service object that allows a client to start and abort the operation, and query the state of the operation.
The command interface has the following methods and properties:
- Start() – A method to start the execution of the command
- Abort() – A methods to abort the execution of the command
- Clear() – A method to clear the results of the command
- State – indicates the current state of the command.
- Done – indicates that the last execution completed succesfully
- Error – indicates that the last execution failed to complete successfully
- ErrorId – error code relating to the reason the last execution failed to complete successfully
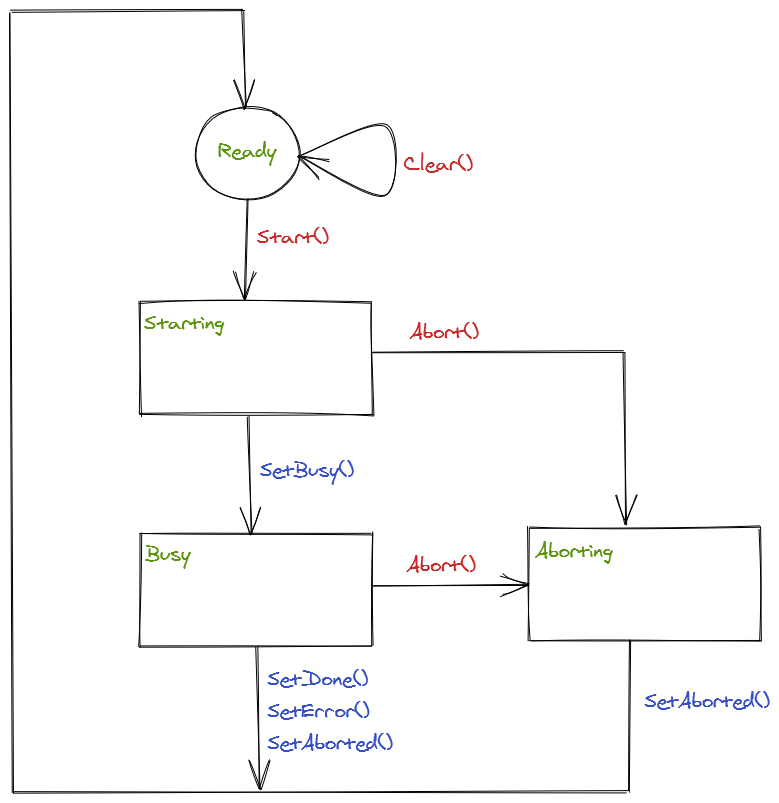
The possible states are:
- Ready – not currently executing
- Starting – a start command has been accepted, but execution has not begun
- Busy – currently executing
- Aborting – an abort command has been recieved so the command is terminating to leave the service object in a ready state
The command object implements the following methods that are used by the service object to update the State property
- SetBusy()
- SetDone()
- SetError(ErrorId)
- SetAborted()
Command Usage
The service object exposes the command interface as a property (Command). The client object holds a reference to this command interface (CommandInterface)
- The client object invokes the operation by calling CommandInterface.Start(), which returns true if the start was accepted (i.e the state was ready)
- The service object detects that the command state is starting and initiates the operation, calling Command.SetBusy() to set the state to busy
- If the operation completes sucessfully, the service object calls Command.SetDone(), which sets Done property and sets the state back to ready
- If the operation fails, the service object calls Command.SetError(ErrorId), which sets the Error and ErrorId properties, and sets the state back to ready
- The client object monitors the command interface properties to determine the result of the operation, and act accordingly.
Command Benefits
The command encapsulates the interaction between the client object and the service object, reducing duplicated code by defining the ineraction once.
It creates a standard pattern across the program for how clients invoke operations on services, so a sequence of operations can be implemented by a state machine that sequentially calls Start() and checks Done or Error on a series of command interfaces
It supports both an ‘execute with feedback’ and a ‘fire and forget’ approach to triggering an operation. The former is useful in sequences where progress to the next step requires confirmation that the operation has completed. The latter is useful in response to manual commands where it is reasonable to ignore the command cannot be executed.
The client and the service become decoupled – the client no longer cares about the type of object that the service is, only that it has an interface that controls the invocation of the operation.
A description of an implementation of this pattern can be found here.
Further Decoupling – Domain Events
Domain events are an implementation of the observer pattern that allows an object to publish the fact that something has occurred to other interested subscriber objects (whose types are unknown to the publisher).
A domain event holds a list of objects that are to be notified when the event is raised. It has the following methods for updating this list:
- ClearEventHandlers()
- AddEventHandler()
The domain event has methods that allows the client to add event data and to raise the event:
- EventArgs.AddInt()
- EventArjs.AddString()
- EventArgs.AddLreal() etc
- Raise()
The raise method causes a method in each registered subscriber to be executed, with the EventArgs passed in for evaluation by this event handler method.
The main benefits are:
- The removal of dependancies between the publisher and the subscriber.
- The synchronous nature of the update – all subscribes are updated at the same time.
- The ability to have many objects react to a single event in a one to many relationship
- The ability to have many objects raise a single event in a many to one relationship
- The cognitive decoupling that it allows between thinking about the event being raised and the event being handled.
A description of an implementation of this pattern can be found here.
Summary
The resulting architecture is based on a global list of small objects that interact using dependancy inversion, commands and events. Where the objects’ relationship is one-to-one, dependancy inversion or the command pattern are the best ways for them to communicate as this is easier to follow and understand than an event mechanism. Events are appropriate for one to many relationships (such as manual control events that must be handled by multiple objects) and many to one relationships (such as where many instances of the same class can raise the an event that must be handled by a single object.